How to Design a Radar Using Processing
Radar (SONAR) Using Processing 3
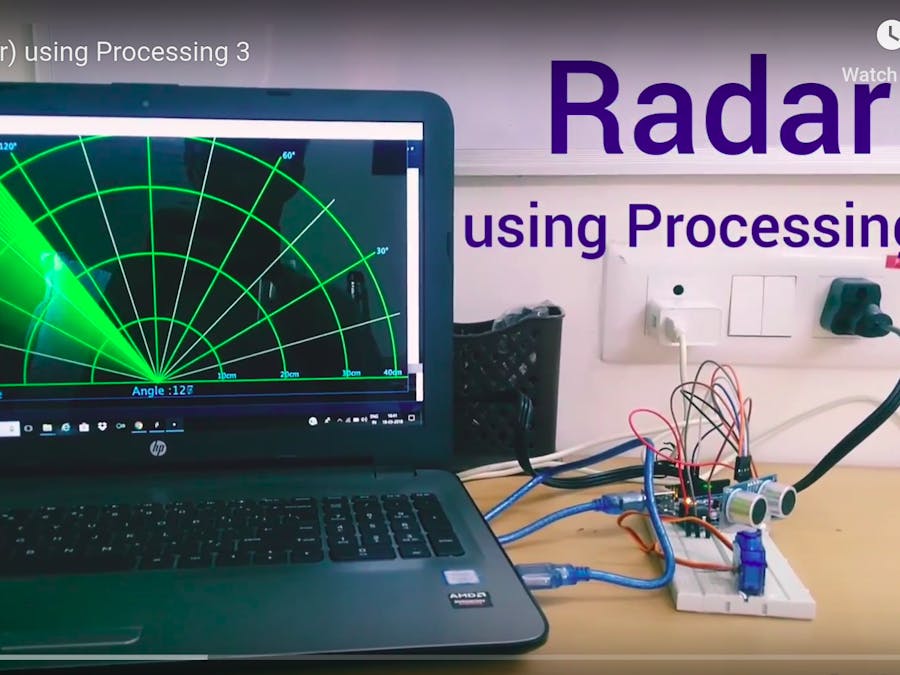
We are using an ultrasound sensor that emits a signal and takes a reading which is displayed on screen using Processing 3.
- bluetooth
- home automation
- rc car
- robotics
- 16,186 views
- 10 comments
- 30 respects
Components and supplies
About this project
Idea : We are using an ultrasound sensor which emits a signal through the trigger pin and takes in the reflected wave from the echo pin.Hence by using the speed of sound, calculate the distance of an object from the sensor. Servo motor rotates the sensor through 180 degrees to cover the area.Once we have the information, we produce it using Processing 3.
Connections : https://yainnoware.blogspot.com/p/radar-sonar-using-processing-3.html
Code
- Arduino IDE Code
- Processing 3 Code
Arduino IDE CodeC/C++
#include <Servo.h> const int trigPin = 12 ; const int echoPin = 11 ; long duration ; int distance ; Servo s1 ; void setup () { Serial . begin ( 9600 ); pinMode ( trigPin , OUTPUT ); pinMode ( echoPin , INPUT ); s1 . attach ( 9 ); } void loop () { for ( int i = 15 ; i <= 165 ; i ++ ){ // rotates the servo motor from 15 to 165 degrees s1 . write ( i ); delay ( 30 ); distance = calDist (); Serial . print ( i ); // Sends the current degree into the Serial Port Serial . print ( "," ); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing Serial . print ( distance ); // Sends the distance value into the Serial Port Serial . print ( "." ); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing } for ( int i = 165 ; i > 15 ; i -- ){ s1 . write ( i ); delay ( 30 ); distance = calDist (); Serial . print ( i ); Serial . print ( "," ); Serial . print ( distance ); Serial . print ( "." ); } } int calDist () { digitalWrite ( trigPin , LOW ); delayMicroseconds ( 2 ); // Sets the trigPin on HIGH state for 10 micro seconds digitalWrite ( trigPin , HIGH ); delayMicroseconds ( 10 ); digitalWrite ( trigPin , LOW ); // Reads the echoPin, returns the sound wave travel time in microseconds duration = pulseIn ( echoPin , HIGH ); // Calculating the distance distance = duration * 0.034 / 2 ; // Range : 2cm to 400 cm return distance ; }
Processing 3 Code C/C++
import processing . serial . * ; // imports library for serial communication Serial myPort ; // defines Object for Serial String ang = "" ; String distance = "" ; String data = "" ; int angle , dist ; void setup () { size ( 1200 , 700 ); myPort = new Serial ( this , "COM4" , 9600 ); // starts the serial communication myPort . bufferUntil ( '.' ); // reads the data from the serial port up to the character '.' before calling serialEvent background ( 0 ); } void draw () { //for the blur effect fill ( 0 , 5 ); //colour,opacity noStroke (); rect ( 0 , 0 , width , height * 0.93 ); noStroke (); fill ( 0 , 255 ); rect ( 0 , height * 0.93 , width , height ); // so that the text having angle and distance doesnt blur out drawRadar (); drawLine (); drawObject (); drawText (); } void serialEvent ( Serial myPort ) { // starts reading data from the Serial Port // reads the data from the Serial Port up to the character '.' and puts it into the String variable "data". data = myPort . readStringUntil ( '.' ); data = data . substring ( 0 , data . length () - 1 ); int index1 = data . indexOf ( "," ); ang = data . substring ( 0 , index1 ); distance = data . substring ( index1 + 1 , data . length ()); angle = int ( ang ); dist = int ( distance ); System . out . println ( angle ); } void drawRadar () { pushMatrix (); noFill (); stroke ( 10 , 255 , 10 ); //green strokeWeight ( 3 ); translate ( width / 2 , height - height * 0.06 ); line ( - width / 2 , 0 , width / 2 , 0 ); arc ( 0 , 0 ,( width * 0.5 ),( width * 0.5 ), PI , TWO_PI ); arc ( 0 , 0 ,( width * 0.25 ),( width * 0.25 ), PI , TWO_PI ); arc ( 0 , 0 ,( width * 0.75 ),( width * 0.75 ), PI , TWO_PI ); arc ( 0 , 0 ,( width * 0.95 ),( width * 0.95 ), PI , TWO_PI ); line ( 0 , 0 ,( - width / 2 ) * cos ( radians ( 30 )),( - width / 2 ) * sin ( radians ( 30 ))); line ( 0 , 0 ,( - width / 2 ) * cos ( radians ( 60 )),( - width / 2 ) * sin ( radians ( 60 ))); line ( 0 , 0 ,( - width / 2 ) * cos ( radians ( 90 )),( - width / 2 ) * sin ( radians ( 90 ))); line ( 0 , 0 ,( - width / 2 ) * cos ( radians ( 120 )),( - width / 2 ) * sin ( radians ( 120 ))); line ( 0 , 0 ,( - width / 2 ) * cos ( radians ( 150 )),( - width / 2 ) * sin ( radians ( 150 ))); stroke ( 175 , 255 , 175 ); strokeWeight ( 1 ); line ( 0 , 0 ,( - width / 2 ) * cos ( radians ( 15 )),( - width / 2 ) * sin ( radians ( 15 ))); line ( 0 , 0 ,( - width / 2 ) * cos ( radians ( 45 )),( - width / 2 ) * sin ( radians ( 45 ))); line ( 0 , 0 ,( - width / 2 ) * cos ( radians ( 75 )),( - width / 2 ) * sin ( radians ( 75 ))); line ( 0 , 0 ,( - width / 2 ) * cos ( radians ( 105 )),( - width / 2 ) * sin ( radians ( 105 ))); line ( 0 , 0 ,( - width / 2 ) * cos ( radians ( 135 )),( - width / 2 ) * sin ( radians ( 135 ))); line ( 0 , 0 ,( - width / 2 ) * cos ( radians ( 165 )),( - width / 2 ) * sin ( radians ( 165 ))); popMatrix (); } void drawLine () { pushMatrix (); strokeWeight ( 9 ); stroke ( 0 , 255 , 0 ); translate ( width / 2 , height - height * 0.06 ); line ( 0 , 0 ,( width / 2 ) * cos ( radians ( angle )),( - width / 2 ) * sin ( radians ( angle ))); popMatrix (); } void drawObject () { pushMatrix (); strokeWeight ( 9 ); stroke ( 255 , 0 , 0 ); translate ( width / 2 , height - height * 0.06 ); float pixleDist = ( dist / 40.0 ) * ( width / 2.0 ); // covers the distance from the sensor from cm to pixels float pd = ( width / 2 ) - pixleDist ; float x =- pixleDist * cos ( radians ( angle )); float y =- pixleDist * sin ( radians ( angle )); if ( dist <= 40 ) // limiting the range to 40 cms { //line(0,0,pixleDist,0); line ( - x , y , - x + ( pd * cos ( radians ( angle ))), y - ( pd * sin ( radians ( angle )))); } popMatrix (); } void drawText () { pushMatrix (); fill ( 100 , 200 , 255 ); textSize ( 25 ); text ( "10cm" ,( width / 2 ) + ( width * 0.115 ), height * 0.93 ); text ( "20cm" ,( width / 2 ) + ( width * 0.24 ), height * 0.93 ); text ( "30cm" ,( width / 2 ) + ( width * 0.365 ), height * 0.93 ); text ( "40cm" ,( width / 2 ) + ( width * 0.45 ), height * 0.93 ); textSize ( 40 ); text ( "YAinnoware" , width * 0.08 , height * 0.99 ); text ( "Angle :" + angle , width * 0.45 , height * 0.99 ); if ( dist <= 40 ) { text ( "Distance :" + dist , width * 0.7 , height * 0.99 ); } translate ( width / 2 , height - height * 0.06 ); textSize ( 25 ); text ( " 30°" ,( width / 2 ) * cos ( radians ( 30 )),( - width / 2 ) * sin ( radians ( 30 ))); text ( " 60°" ,( width / 2 ) * cos ( radians ( 60 )),( - width / 2 ) * sin ( radians ( 60 ))); text ( "90°" ,( width / 2 ) * cos ( radians ( 91 )),( - width / 2 ) * sin ( radians ( 90 ))); text ( "120°" ,( width / 2 ) * cos ( radians ( 123 )),( - width / 2 ) * sin ( radians ( 118 ))); text ( "150°" ,( width / 2 ) * cos ( radians ( 160 )),( - width / 2 ) * sin ( radians ( 150 ))); popMatrix (); }
How to Design a Radar Using Processing
Source: https://create.arduino.cc/projecthub/Yug_Ajmera/radar-sonar-using-processing-3-7302c6
Comments